-
GEODE Hook System: 이벤트로 파이프라인을 오가는 이벤트 버스Harness/architecture 2026. 3. 16. 02:57
Date: 2026-03-16
Author: Claude Code Opus 4.6, mangowhoiscloud
Tags: [hooks, event-driven, orchestration, plugin, bootstrap, stuck-detection, run-log, pub-sub]목차
- 도입 — 노드 사이의 보이지 않는 연결
- 27개 이벤트 — 전체 분류 체계
- HookSystem — 우선순위 기반 동기 실행
- 파이프라인 관통 — 노드 래핑 패턴
- Bootstrap — 실행 전 컨텍스트 주입
- 소비자들 — 로그, 탐지, 메모리, 자동화
- 플러그인 확장 — YAML과 클래스 기반 디스커버리
- 합성 패턴 — 팬아웃, 체이닝, 루프백
- 왜 Sync인가 — async 전환 시도와 좌절
- 서브에이전트와 Hook의 관계 — as_completed 패턴
- 마무리
1. 도입: 노드 사이의 보이지 않는 연결
GEODE의 LangGraph 파이프라인은 8개 노드가 순차/병렬로 실행됩니다.
각 노드는 자신의 출력만 상태에 기록하고, 다른 노드의 내부 동작을 알지 못합니다. 이것이 Clean Architecture의 핵심입니다.
그러나 프로덕션 환경에서는 노드 사이에서 일어나야 할 일이 있습니다.
요구 사항 노드 안에서 처리? 문제 Analyst 실행 시간 로깅 가능 모든 노드에 로깅 코드 중복 Scoring 후 drift 감지 가능 scoring.py가 CUSUM 의존 파이프라인 종료 후 메모리 저장 가능 synthesizer.py가 memory 의존 노드 실행 전 프롬프트 오버라이드 불가능 노드 시작 전에 개입 필요 노드에 이 로직을 직접 넣으면 순환 의존(circular dependency)이 발생합니다. scoring 노드가 drift 감지를 알아야 하고, 감지 결과가 다시 scoring에 영향을 주는 구조입니다.
Hook System은 이 문제를 이벤트 기반 pub/sub로 해결합니다. 노드는 이벤트를 발행(publish)만 하고, 누가 구독(subscribe)하는지 알지 못합니다.
Node(scoring) → emit(SCORING_COMPLETE) → ? ├─ RunLog: 로깅 ├─ StuckDetector: 완료 마킹 └─ DriftDetector: CUSUM 검사
2. 27개 이벤트 — 전체 분류 체계
# core/orchestration/hooks.py class HookEvent(Enum): # Pipeline (3) PIPELINE_START = "pipeline_start" PIPELINE_END = "pipeline_end" PIPELINE_ERROR = "pipeline_error" # Node (4) NODE_BOOTSTRAP = "node_bootstrap" NODE_ENTER = "node_enter" NODE_EXIT = "node_exit" NODE_ERROR = "node_error" # Analysis (3) ANALYST_COMPLETE = "analyst_complete" EVALUATOR_COMPLETE = "evaluator_complete" SCORING_COMPLETE = "scoring_complete" # Verification (2) VERIFICATION_PASS = "verification_pass" VERIFICATION_FAIL = "verification_fail" # Automation (6) DRIFT_DETECTED = "drift_detected" OUTCOME_COLLECTED = "outcome_collected" MODEL_PROMOTED = "model_promoted" SNAPSHOT_CAPTURED = "snapshot_captured" TRIGGER_FIRED = "trigger_fired" POST_ANALYSIS = "post_analysis" # Memory (4) MEMORY_SAVED = "memory_saved" RULE_CREATED = "rule_created" RULE_UPDATED = "rule_updated" RULE_DELETED = "rule_deleted" # Prompt (2) PROMPT_ASSEMBLED = "prompt_assembled" PROMPT_DRIFT_DETECTED = "prompt_drift_detected" # SubAgent (3) SUBAGENT_STARTED = "subagent_started" SUBAGENT_COMPLETED = "subagent_completed" SUBAGENT_FAILED = "subagent_failed"27개 이벤트를 8개 카테고리로 분류한 이유는 관심사 분리입니다. RunLog는 모든 이벤트를 구독하지만, DriftDetector는 SCORING_COMPLETE만, BootstrapManager는 NODE_BOOTSTRAP만 구독합니다. 각 소비자가 자신에게 필요한 이벤트만 선택적으로 수신합니다.
카테고리 이벤트 수 발행자 대표 소비자 Pipeline 3 _make_hooked_nodeRunLog, StuckDetector Node 4 _make_hooked_nodeBootstrapManager, RunLog Analysis 3 _make_hooked_nodeDriftDetector Verification 2 _verification_nodeTriggerManager Automation 6 TriggerManager, DriftDetector RunLog Memory 4 ProjectMemory RunLog Prompt 2 PromptAssembler Drift 감사 SubAgent 3 SubAgentManager RunLog, HookSystem
3. HookSystem: 우선순위 기반 동기 실행
핵심 인터페이스
# core/infrastructure/ports/hook_port.py @runtime_checkable class HookSystemPort(Protocol): def trigger(self, event: Enum, data: dict[str, Any]) -> None: ... def register(self, event: Enum, handler: Callable, *, name: str = "", priority: int = 50) -> None: ... def unregister(self, event: Enum, name: str) -> bool: ...HookSystemPort를 Protocol로 정의한 이유는 Port/Adapter 패턴입니다. 테스트에서 MockHookSystem으로 교체하거나, 향후 async 구현으로 전환할 때 소비자 코드를 변경하지 않아도 됩니다.
구현: 우선순위 정렬 + 에러 격리
# core/orchestration/hooks.py class HookSystem: def trigger(self, event: HookEvent, data: dict[str, Any]) -> list[HookResult]: results: list[HookResult] = [] for hook in sorted(self._hooks.get(event, []), key=lambda h: h.priority): try: hook.handler(event, data) results.append(HookResult(success=True, event=event, handler_name=hook.name)) except Exception as exc: log.warning("Hook '%s' failed on %s: %s", hook.name, event.value, exc) results.append(HookResult(success=False, event=event, handler_name=hook.name, error=str(exc))) return results두 가지 핵심 설계 결정이 있습니다.
1. 동기 실행입니다. 핸들러가 순서대로 실행되므로 priority 50의 RunLog가 priority 80의 Snapshot보다 먼저 기록됩니다. 비동기로 전환하면 실행 순서를 보장할 수 없습니다.
2.에러 격리입니다. 한 핸들러의 예외가 나머지 핸들러와 파이프라인 자체에 영향을 주지 않습니다.
4. 파이프라인 관통: 노드 래핑 패턴
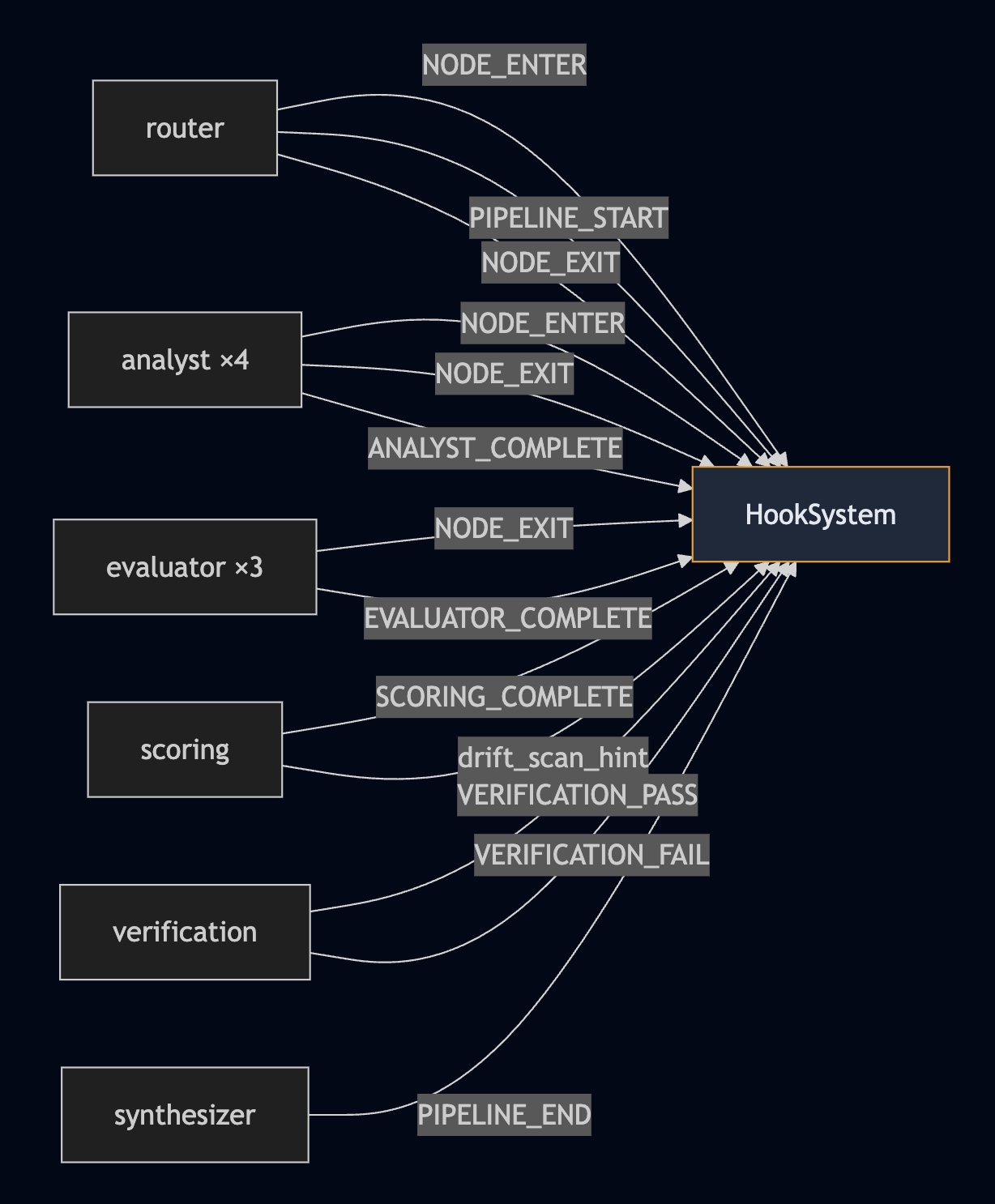
모든 노드는
_make_hooked_node()래퍼를 통해 실행됩니다. 이 함수가 노드 실행 전후에 Hook 이벤트를 발행합니다.# core/graph.py — _make_hooked_node() (simplified) def _make_hooked_node(node_fn, node_name, hooks, bootstrap_mgr): def _wrapped(state: GeodeState) -> dict[str, Any]: hook_data = {"node": node_name, "ip_name": state.get("ip_name", "")} # Phase 1: Bootstrap (pre-execution injection) if bootstrap_mgr: ctx = bootstrap_mgr.prepare_node(node_name, ...) if ctx.skip: return {} state = bootstrap_mgr.apply_context(state, ctx) # Phase 2: NODE_ENTER hooks.trigger(HookEvent.NODE_ENTER, hook_data) if node_name == "router": hooks.trigger(HookEvent.PIPELINE_START, hook_data) # Phase 3: Execute start = time.time() result = node_fn(state) # Phase 4: NODE_EXIT + completion events hook_data["duration_ms"] = (time.time() - start) * 1000 hooks.trigger(HookEvent.NODE_EXIT, hook_data) if node_name in _NODE_COMPLETION_EVENTS: hooks.trigger(_NODE_COMPLETION_EVENTS[node_name], hook_data) # Phase 5: Special — scoring drift hint, verification pass/fail if node_name == "scoring" and result.get("final_score", 0) > 0: hook_data["drift_scan_hint"] = True if node_name == "synthesizer": hooks.trigger(HookEvent.PIPELINE_END, hook_data) return result return _wrapped노드 함수 node_fn은 Hook의 존재를 전혀 모릅니다. _make_hooked_node가 데코레이터처럼 노드를 감싸서 라이프사이클 이벤트를 주입합니다. 이 패턴 덕분에 analysts.py나 scoring.py에 Hook 관련 코드가 단 한 줄도 없습니다.
노드별 이벤트 발행 맵
5. Bootstrap: 실행 전 컨텍스트 주입
NODE_BOOTSTRAP는 다른 이벤트와 근본적으로 다릅니다.다른 이벤트가 관찰(observation)을 위한 것이라면, Bootstrap은 개입(intervention)을 위한 것입니다.
BootstrapContext
# core/orchestration/bootstrap.py @dataclass class BootstrapContext: node_name: str ip_name: str prompt_overrides: dict[str, str] = field(default_factory=dict) extra_instructions: list[str] = field(default_factory=list) parameters: dict[str, Any] = field(default_factory=dict) skip: bool = False # True이면 노드 실행 자체를 건너뜀BootstrapContext는 mutable(변경 가능)입니다. Hook 핸들러가 이 객체를 참조로 받아 in-place로 수정합니다.
이 설계는 여러 핸들러가 독립적으로 ctx에 지시를 추가할 수 있게 합니다.사용 시나리오
# 특정 IP에 대해 Analyst 온도 조정 def custom_bootstrap(ctx: BootstrapContext) -> None: if ctx.ip_name == "Berserk" and ctx.node_name == "analyst": ctx.parameters["temperature"] = 0.1 # 더 결정적으로 ctx.extra_instructions.append("Focus on Souls-like mechanics.") bootstrap_mgr.register_override("analyst", custom_bootstrap)register_override(node_name, fn)은 내부적으로 NODE_BOOTSTRAP 이벤트에 핸들러를 등록하되, 핸들러 안에서 data["node"] != node_name이면 early return합니다. 노드 이름 필터링을 캡슐화하여 사용자가 이벤트 필터링을 직접 구현할 필요가 없습니다.
6. Subscriber: 로그, 탐지, 메모리, 자동화
RunLog: 전 이벤트 감사 로그
# core/runtime.py — 모든 이벤트에 대해 등록 for event in HookEvent: hooks.register(event, run_log_handler, name="run_log_writer", priority=50)RunLog는 모든 27개 이벤트를 구독합니다. JSONL 형식으로 디스크에 기록하며, 2MB 또는 2000줄 초과 시 자동 정리됩니다.
{"event": "node_exit", "node": "analyst", "ip_name": "Berserk", "duration_ms": 2341.5, "status": "ok", "run_id": "a1b2c3"}priority 50은 GEODE의 기본 핸들러 중 가장 낮은 우선순위입니다.
다른 핸들러(Snapshot 80, Memory 85)보다 먼저 실행되어 이벤트 발생 시점을 정확히 기록합니다.StuckDetector: 데드락 감지
# core/orchestration/stuck_detection.py hooks.register(HookEvent.NODE_ENTER, _on_enter, name="stuck_detector_enter", priority=90) hooks.register(HookEvent.NODE_EXIT, _on_exit, name="stuck_detector_exit", priority=90) hooks.register(HookEvent.NODE_ERROR, _on_error, name="stuck_detector_error", priority=90)NODE_ENTER에서 타이머를 시작하고,NODE_EXIT이나NODE_ERROR에서 타이머를 해제합니다.2시간(기본값) 동안 EXIT이 오지 않으면
PIPELINE_ERROR를 발행합니다.StuckDetector는 Hook을 소비하면서 동시에 발행합니다.
NODE_ENTER를 소비하고, 타임아웃 시 PIPELINE_ERROR를 발행합니다. 이것이 Hook 시스템의 체이닝(chaining) 패턴입니다.Memory Write-Back: L3 → L2 피드백
# PIPELINE_END → memory_write_back (priority 85) def _pipeline_end_handler(event, data): if data.get("dry_run"): return # dry-run에서는 메모리 저장 안 함 insight = f"{data['ip_name']}: {data['tier']} ({data['final_score']:.1f})" project_memory.save_insight(insight)파이프라인 결과가 자동으로 프로젝트 메모리(.claude/MEMORY.md)에 기록됩니다.
다음 분석 시 memory_context로 이전 결과를 참조할 수 있습니다. L3(Orchestration) → L2(Memory) 피드백 루프의 구현입니다.기본 핸들러 전체 목록
핸들러 이벤트 Priority 역할 run_log_writerALL (27) 50 JSONL 감사 로그 stuck_detector_enterNODE_ENTER 90 실행 타이머 시작 stuck_detector_exitNODE_EXIT 90 타이머 해제 stuck_detector_errorNODE_ERROR 90 타이머 해제 drift_auto_snapshotDRIFT_DETECTED 80 자동 스냅샷 drift_pipeline_triggerDRIFT_DETECTED 70 후속 분석 트리거 pipeline_end_snapshotPIPELINE_END 80 최종 상태 스냅샷 memory_write_backPIPELINE_END 85 분석 인사이트 저장 drift_loggerDRIFT_DETECTED 90 Drift 로깅 snapshot_loggerSNAPSHOT_CAPTURED 90 스냅샷 ID 로깅 trigger_loggerTRIGGER_FIRED 90 트리거 로깅 outcome_loggerOUTCOME_COLLECTED 90 피드백 로깅
7. 플러그인 확장: YAML과 클래스 기반 디스커버리
외부 개발자가 코어 코드를 수정하지 않고 Hook 핸들러를 추가할 수 있습니다.
YAML 기반 플러그인
# plugins/slow_node_monitor/hook.yaml name: slow-node-monitor events: - node_exit - verification_fail priority: 75 enabled: true handler: monitor.py# plugins/slow_node_monitor/monitor.py def handle(event, data): if event.value == "node_exit": duration = data.get("duration_ms", 0) if duration > 5000: log.warning("Slow node: %s took %.1fs", data["node"], duration / 1000)클래스 기반 플러그인
# plugins/custom_analytics/hook.py class AnalyticsPlugin: @property def metadata(self) -> HookPluginMetadata: return HookPluginMetadata( name="analytics", events=[HookEvent.PIPELINE_END, HookEvent.SCORING_COMPLETE], priority=60, ) def handle(self, event: HookEvent, data: dict[str, Any]) -> None: if event == HookEvent.PIPELINE_END: self._send_to_dashboard(data)디스커버리 프로세스
# core/orchestration/hook_discovery.py loader = HookPluginLoader() loader.load_from_dirs([Path("./plugins"), Path("~/.geode/plugins")]) loader.register_all(hooks) # 모든 플러그인의 핸들러를 HookSystem에 등록디스커버리는 lazy loading입니다. discover_hooks()는 메타데이터만 파싱하고, load_from_dirs()에서 비로소 핸들러 모듈을 importlib로 로딩합니다. 비활성(enabled: false) 플러그인은 모듈 로딩조차 하지 않습니다.
8. Fan-out, 체이닝, 루프백
Fan-out : 하나의 이벤트, 다수의 소비자
PIPELINE_END ├─ (priority 50) run_log_writer → JSONL 기록 ├─ (priority 80) pipeline_end_snapshot → 상태 스냅샷 └─ (priority 85) memory_write_back → MEMORY.md 갱신세 핸들러가 순서대로 실행됩니다. RunLog가 먼저 기록하므로 스냅샷이나 메모리 저장 중 오류가 발생해도 이벤트 기록은 보존됩니다.
체이닝: 이벤트가 이벤트를 발행
SCORING_COMPLETE → drift_scan_hint = True → DriftDetector 검사 → DRIFT_DETECTED 발행 → drift_auto_snapshot → SNAPSHOT_CAPTURED → drift_pipeline_trigger → 후속 분석 실행 → PIPELINE_END → memory_write_back체이닝은 무한 루프 위험이 있습니다. GEODE에서는 PIPELINE_END → 메모리 저장으로 체인이 종결되며, 메모리 저장은 MEMORY_SAVED 이벤트를 발행하지만 이를 구독하는 핸들러가 파이프라인을 재실행하지 않습니다.
체인의 종결 조건이 구조적으로 보장됩니다.의도적 미구현 — Hook 기반 루프백
파이프라인의 verification → gather → signals 루프백은 Hook이 아닌 LangGraph 조건부 엣지로 구현됩니다.
# core/graph.py — conditional edge graph.add_conditional_edges("verification", _should_loop_back, {"gather": "gather", "synthesizer": "synthesizer"})루프백을 Hook으로 구현하면 VERIFICATION_FAIL → 핸들러가 상태를 수정 → 파이프라인 재실행이라는 복잡한 제어 흐름이 생깁니다. LangGraph의 조건부 엣지는 이 흐름을 그래프 토폴로지로 선언적으로 표현합니다. Hook은 관찰과 부수 효과에, LangGraph는 제어 흐름에 사용하는 것이 GEODE의 원칙입니다.
9. Sync Hook + Async 노드: 프론티어 코드베이스에서 증류한 결론
LangGraph는 async 노드를 지원한다
검증 결과 async def 노드 + Send API + .astream()이 완전히 작동합니다.
# 검증: Send + async 4개 병렬 → 3.9x speedup async def async_worker(state): await asyncio.sleep(0.1) return {'values': [f'{state["_worker_type"]}_done']} def fan_out(state): return [Send('worker', {'_worker_type': f'w_{i}', 'values': []}) for i in range(4)] # 결과: 0.103초 (순차 0.4초 대비 3.9x)P3 asyncio 시도(v0.11.0)가 리버트된 이유는 LangGraph 제약이 아니라 Big-Bang 전환의 파급 범위(9개 노드 + 2000 테스트 일괄 변경)였습니다.
그렇다면 Hook은 왜 sync로 남기는가
핵심 질문은 "LangGraph가 async를 지원하니 Hook도 async로 바꿔야 하지 않는가"입니다.
GitHub 코드베이스 4곳을 조사한 결과, 답은 아니오입니다.
프론티어 코드베이스 실증 분석
Anthropic Claude Agent SDK (github.com/anthropics/claude-agent-sdk-python)
에이전트 루프는 async (
async for message in query()), 도구 함수도 async (async def greet_user).그러나 Hook은 sync 콜백입니다.
# Claude Agent SDK — Hook은 sync function async def check_bash_command(input_data, tool_use_id, context): # sync 로직으로 permission 결정 return {"hookSpecificOutput": {"permissionDecision": "deny"}} options = ClaudeAgentOptions( hooks={"PreToolUse": [HookMatcher(matcher="Bash", hooks=[check_bash_command])]} )Anthropic이 공식 SDK에서 "async 루프 + sync Hook" 패턴을 채택한 것은 Hook의 역할이 관찰/제어이지 I/O가 아니기 때문입니다. permission 결정, 로깅, 메트릭 수집은 메모리 연산이라 async의 이점이 없습니다.
OpenAI Codex (github.com/openai/codex)
Rust tokio 기반 async. 도구를
FuturesOrdered로 병렬 디스패치하지만, PR #10505에서 3+ 병렬 tool_call 시 race condition으로 응답 유실 버그(#8479)가 발견되었습니다.// Codex 버그: ResponseEvent::Completed가 tool future 완료 전에 도착 Stream completed → loop breaks → drain_in_flight 호출 → 일부 future 결과 누락 → 세션 복구 불가async 병렬 도구 실행의 실전 위험을 보여줍니다. completion 보장 없이 async 병렬을 도입하면 데이터 유실이 발생합니다.
CrewAI (github.com/crewAIInc/crewAI)
태스크별
async_execution=True플래그로 opt-in 병렬.asyncio.gather()로 여러 Crew를 동시 실행.LangGraph (github.com/langchain-ai/langgraph)
Superstep 모델로 동일 depth 노드를 자동 병렬 실행.
max_concurrency설정으로 제어.프론티어 컨센서스
프로젝트 LLM 호출 Hook/Event 결론 Claude Agent SDK async sync callback 공식 패턴 OpenAI Codex async N/A 병렬 race condition 경험 CrewAI async N/A 플래그 기반 opt-in LangGraph async 지원 N/A superstep 자동 병렬 GEODE의 결정
ADR-009에서 단계적 전환을 결정했습니다:
- Phase 1:
acall_llm_parsed()async 함수 추가 (기존 sync 유지) - Phase 2: 9개 노드
async def+graph.astream()(feature flag) - Hook은 sync 유지: 프론티어 컨센서스와 일치. async 노드 안에서 sync
hooks.trigger()호출은 안전
# Phase 2 이후의 _make_hooked_node async def _wrapped(state): hooks.trigger(HookEvent.NODE_ENTER, data) # sync — 안전 result = await node_fn(state) # async 노드 hooks.trigger(HookEvent.NODE_EXIT, data) # sync — 안전 return resultasync 함수 안에서 sync 함수를 호출하는 것은 문제 없습니다 (반대가 문제). Python의 await는 코루틴에만 적용되고, 일반 함수 호출은 그대로 동기 실행됩니다. Claude Agent SDK가 이 패턴을 공식 채택한 것이 가장 강력한 근거입니다.
10. 서브에이전트와 Hook의 관계 — as_completed 패턴
문제: 결과 수집의 직렬 블로킹
서브에이전트의 LLM 호출은
IsolatedRunner스레드로 병렬 실행됩니다. 그러나 결과 수집 루프가 제출 순서대로 블로킹하여 관측성이 지연되었습니다.AS-IS (순차 블로킹): wait(task1: 30초) → COMPLETED(task1) wait(task2: 5초) → COMPLETED(task2) ← task2는 25초 전에 끝났지만 여기서야 훅 발행 wait(task3: 15초) → COMPLETED(task3)task2가 5초에 끝나도, task1이 30초 걸리면 task2의
SUBAGENT_COMPLETED훅이 30초 후에 발행됩니다. RunLog에 기록되는 타이밍이 실제 완료 시점과 최대 25초 차이가 납니다.해결: polling round-robin
# core/cli/sub_agent.py — delegate() Phase 3 pending: dict[str, SubTask] = {sid: task for task, sid in session_ids} while pending and time.time() < deadline: completed_sids: list[str] = [] for sid in list(pending): isolation = self._runner.get_result(sid) if isolation is not None: completed_sids.append(sid) task = pending.pop(sid) # 즉시 훅 발행 + on_progress 콜백 self._emit_hook(HookEvent.SUBAGENT_COMPLETED, task, ...) if not completed_sids and pending: time.sleep(poll_interval) # 0.05초 → 최대 0.5초 poll_interval = min(poll_interval * 1.5, max_poll)concurrent.futures.as_completed() 대신 직접 polling을 구현한 이유: IsolatedRunner는 Future를 반환하지 않고 session_id 문자열을 반환합니다. 기존 API를 변경하지 않으면서 as_completed 의미론을 구현하기 위해 round-robin polling을 선택했습니다.
TO-BE (round-robin): poll(1,2,3) → task2 완료! → COMPLETED(task2) 즉시 발행 poll(1,3) → task3 완료! → COMPLETED(task3) 즉시 발행 poll(1) → task1 완료! → COMPLETED(task1) 즉시 발행성능 특성
항목 AS-IS TO-BE 관측성 지연 최대 max(duration) - min(duration)0 (완료 즉시 훅 발행) on_progress 콜백 순차 완료 순 CPU 오버헤드 polling 없음 0.05-0.5초 간격 polling (무시 가능) 타임아웃 처리 개별 _wait_for_result글로벌 deadline + 일괄 FAILED 이 변경은 sync Hook의 한계를 우회합니다. 병렬 실행 자체(threading)는 유지하면서, 결과 수집 순서만 완료 순으로 바꿔 관측성 지연을 제거했습니다. Hook을 async로 바꿀 필요가 없습니다.
11. 마무리
핵심 정리
항목 값 이벤트 수 27개 (8 카테고리) 실행 모델 동기, 우선순위 정렬, 에러 격리 기본 핸들러 12+ (RunLog, StuckDetector, Drift, Snapshot, Memory 등) 플러그인 형식 YAML + Class 기반, lazy loading 관측성 JSONL RunLog (전 이벤트), HookResult 반환 주입 패턴 NODE_BOOTSTRAP → BootstrapContext (mutable, in-place) DI HookSystemPort Protocol — 구현 교체 가능 코드 규모 10+ 파일, ~4000 LOC 설계 원칙
- 노드는 Hook을 모른다: 발행은 래퍼(
_make_hooked_node)가 담당. 노드 코드에 Hook import 없음. - 관찰과 제어의 분리: Hook = 관찰 + 부수 효과. 제어 흐름 = LangGraph 조건부 엣지.
- 에러는 격리한다: 핸들러 하나의 실패가 파이프라인을 멈추지 않음.
- 확장은 등록으로: 코어 수정 없이 플러그인 디렉토리에 파일 추가만으로 확장.
체크리스트
- 27개 HookEvent 전체 분류
- HookSystem 우선순위 + 에러 격리 구현
-
_make_hooked_node래핑 패턴 - BootstrapManager — NODE_BOOTSTRAP 개입
- RunLog 전 이벤트 감사 로그
- StuckDetector 데드락 감지
- Memory write-back L3→L2 피드백
- YAML/Class 기반 플러그인 디스커버리
- 팬아웃/체이닝 합성 패턴
- HookSystemPort Protocol DI
- LangGraph async 노드 지원 검증 (Send + async = 3.9x speedup)
- 프론티어 4곳 코드베이스 실증 ("LLM=async, Hook=sync" 컨센서스)
- 서브에이전트 결과 수집 as_completed 패턴 적용
- ADR-009 async 전환 전략 수립 (단계적 + feature flag)
'Harness > architecture' 카테고리의 다른 글
Thin-Only: standalone REPL을 없애기까지 (0) 2026.03.30 GEODE Hook System: 이벤트 기반 리플 패턴으로 라이프사이클을 제어 (0) 2026.03.28 Kent Beck Simple Design으로 에이전트 코드베이스 리팩토링 (0) 2026.03.26 God Object 해체: 2,554줄 __init__.py를 분해하고 3,000줄을 삭제한 기록 (0) 2026.03.24 Graceful Degradation: 실패해도 시스템이 멈추지 않는 설계 (0) 2026.03.21